|
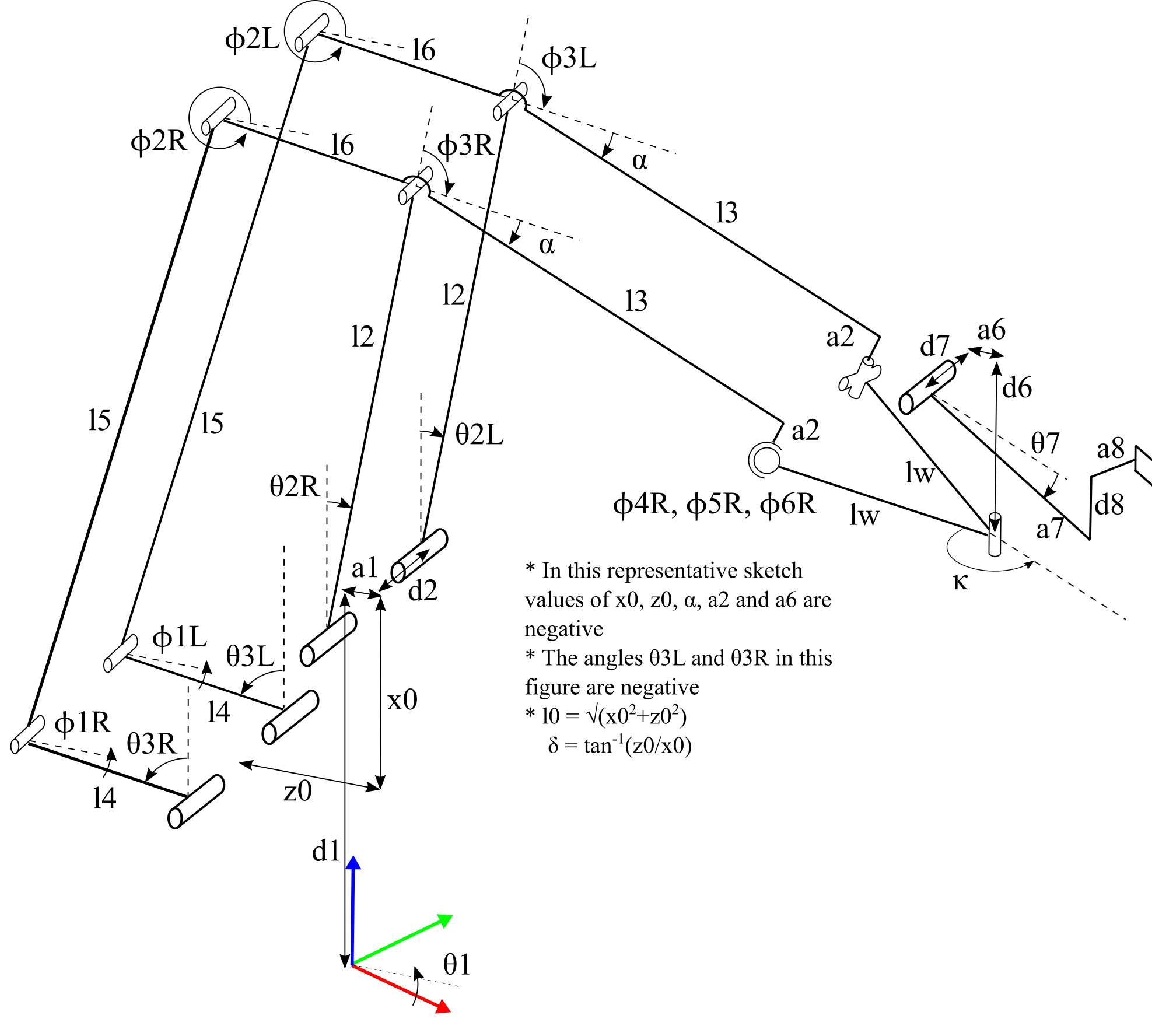
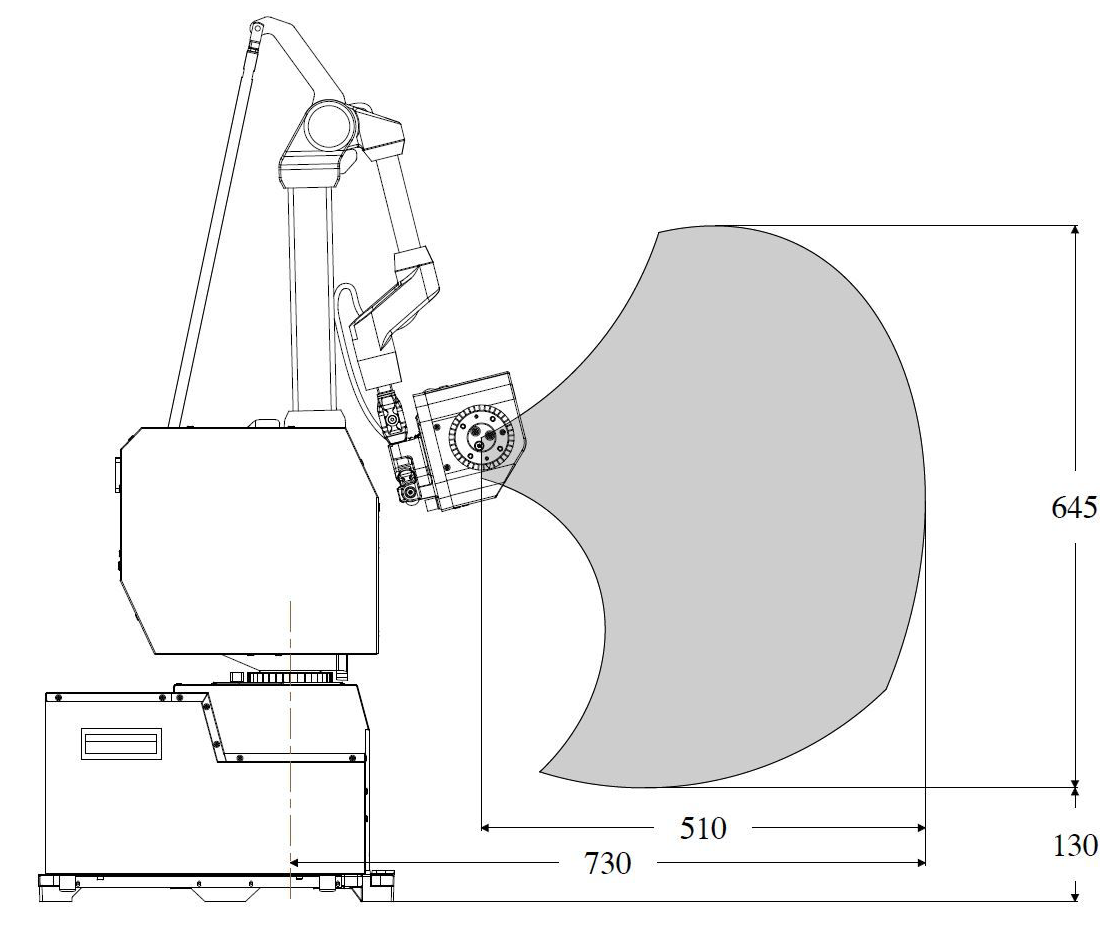
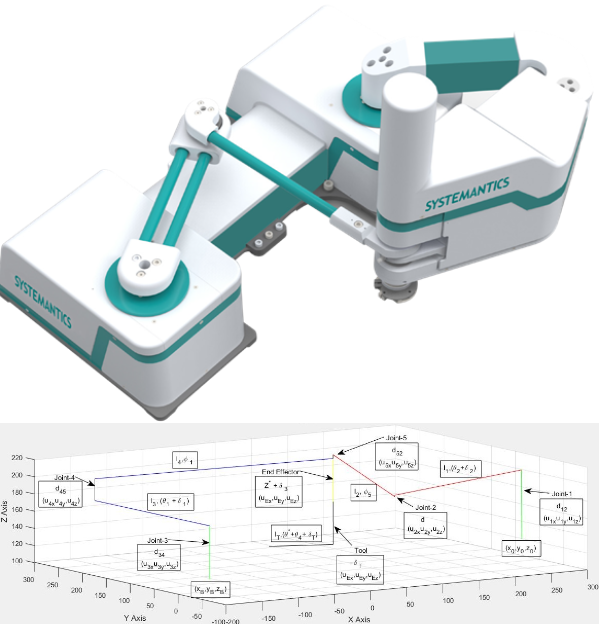
I am a Research Assistant working with Dr. Sandeep Chinchali at the University of Texas at Austin. My research interests are in the application of Machine Learning for Robotics and Safe Autonomy using Formal Methods. I received my B.Tech in Engineering Design and M.Tech in Automotive Engineering from IIT Madras. My Dual Degree Thesis was supervised by Dr. C S Shankar Ram. Previously, I had worked at Systemantics India Pvt Ltd for three years, designing and producing industrial arms affordable to small and medium scale manufacturers in India. I was in charge of algorithm development for motion planning, controls and robot kinematics and dynamics. |

|
|
|
|

|
Autonomous Robots 2023 paper Large image compression gains can be obtained by focusing on downstream task performance at the cost of interpretability. Such a compression is suitable for machine perception but impossible to debug. Showed that the trade-off can be balanced by adversarial training an encoder-decoder network to give similarly high compression while providing human-interpretable reconstruction. Moreover privacy is preserved with reconstruction of images to a single class dependent code. |
|
|
RSS 2023 (Under Review) paper Robot teleoperation and cloud control is reliant on a strong and stable communication network. To utilize standard control paradigms designed for systems without delay it is necessary to monitor the network latency and compensate for its detrimental effects. We developed a shield that provides probabilistic safety guarantees for a remotely controlled robot in the presence of stochastic network delays. The minimally invasive shield monitors the network latency and overrides control commands when necessary to ensure satisfiablity of LTL safety specifications. |

|
C S 393R: Autonomous Robots Fall 2021 paper | video1 | video2 Trained a neural network regression model to achieve faster point-cloud registration of rasterized 2-D Lidar scans with comparable accuracy to search-based methods. Implemented a full autonomous stack to run on an F1/10th car in a mapped environment: global navigation via Jump Point Search A*, localization via Particle Filters, obstacle avoidance via Path Scoring, and local navigation via Optimal Control. |

|
C S 391R: Robot Learning Fall 2022 paper | video1 | video2 | video3 Imitation learning in robot manipulation is known to perform better with policy networks that take in state sequences. Benchamrking against RNNs, we evaluated the effects of transformer design choices like cross-modal attention, featurizer networks, and input sequence size on task performance. |
|
|
|
|
Systemantics 2018-21
|
|
|
Systemantics 2018-21
|
|
Systemantics 2018-21
|
 |
Systemantics 2018-21
|
 |
Systemantics 2017
|
Based on Jon's webpages.